
Beschreibung
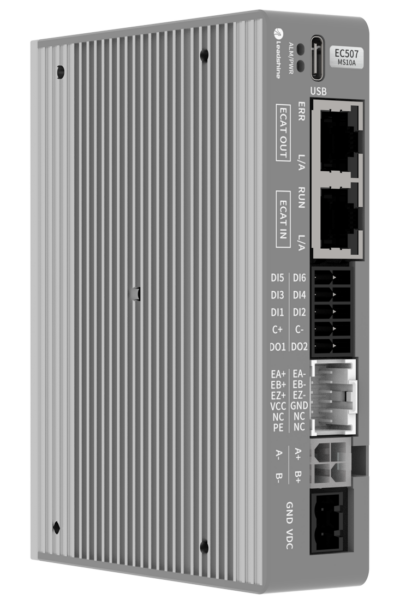
Closed Loop Stepper Drives EtherCAT are designed for precise, reliable stepper motor control in industrial environments. These drives support CANopen over EtherCAT (CoE) communication and CiA 402 operating modes, including Profile Position (PP), Profile Velocity (PV), Homing (HM), and Cyclic Synchronous Position (CSP).
The drives offer dual-axis control, power voltage ranges from 20–80 VDC, and peak output currents up to 8 A, depending on the model. Models can power 2-phase and 4-phase stepper motors, including NEMA 8, 11, 14, 17, 23, 24, and 34 sizes with incremental encoders. Operation includes up to 7 digital inputs and 7 outputs, logical voltage of 12–24 VDC, and maximum input frequency of 10 kHz. All units feature EtherCAT communication for real-time synchronization.
Closed Loop Stepper Drives EtherCAT are suitable for diverse applications, including solar equipment, textile machinery, robotics, power generation, and packaging. The series is noted for high reliability and stable performance in demanding industrial settings.
- EtherCAT communication with CANopen (CoE) support
- Dual-axis control capability
- Wide power voltage range: 20–80 VDC
- Peak output current up to 8 A
- Supports multiple NEMA stepper motor sizes


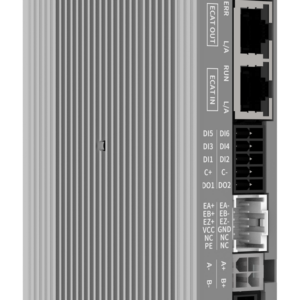




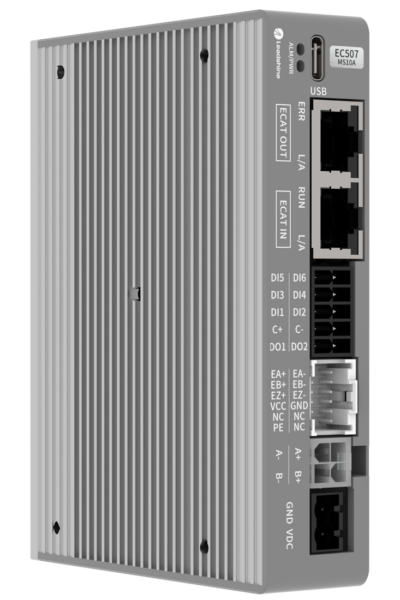
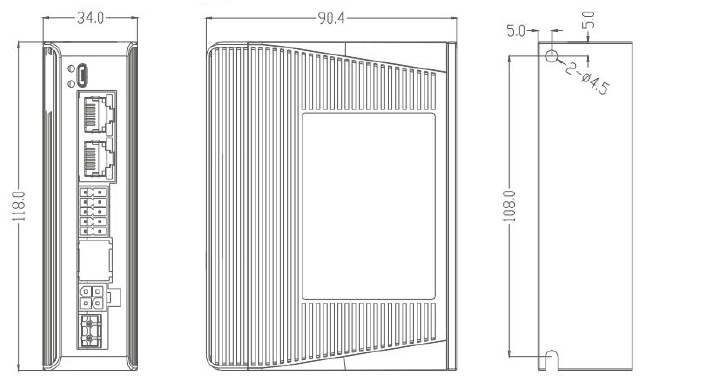
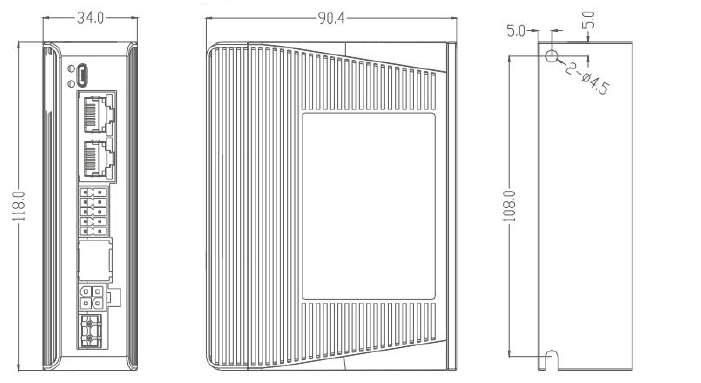
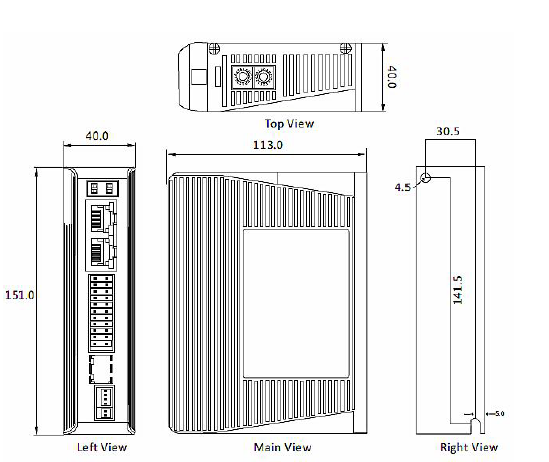
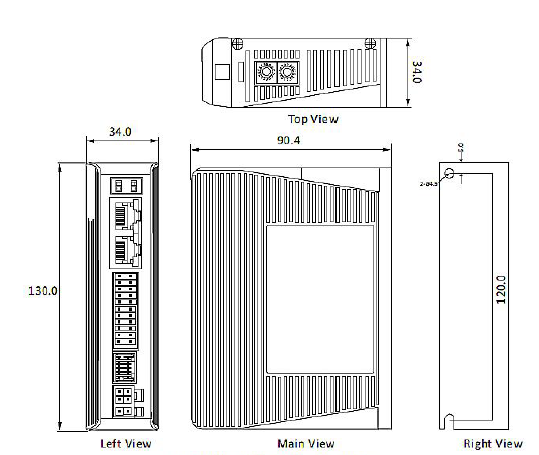
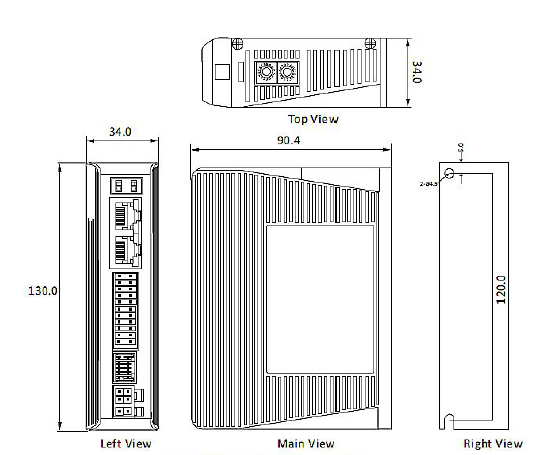
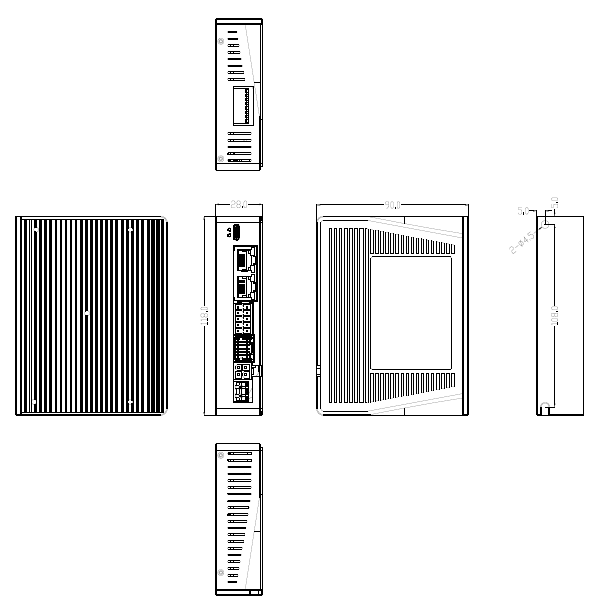 Mechanical
Mechanical
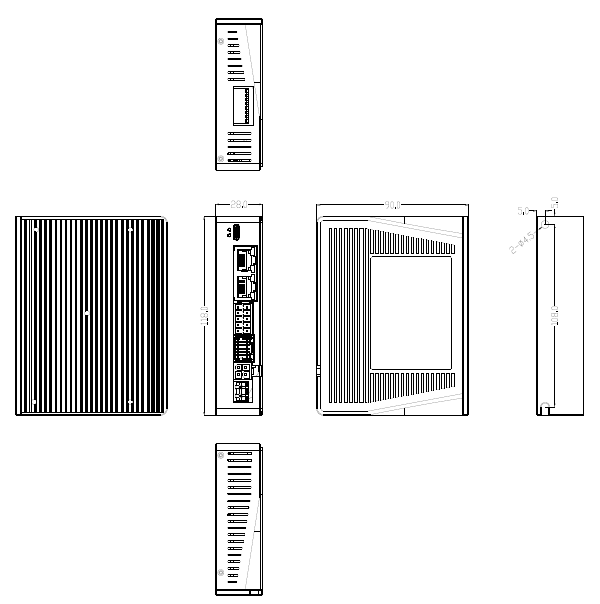 Mechanical
Mechanical