Description
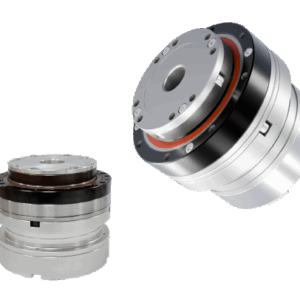
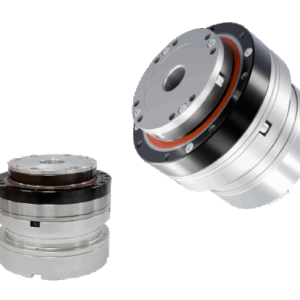
PJ3-97CAN140 is an integrated robotic joint in the Planetary Drive Integrated Joint PJ3 family for compact articulated axes and motion-control assemblies. It combines planetary reduction gearing and CAN / EtherCAT communication in one module, supporting compact integration where space is limited. The unit operates on 24-48 VDC, has IP54 protection, and uses a short 61.2 ±0.5 mm housing length with a 7.5 mm through hole.
This version has a 22:1 gear ratio and delivers 44 Nm rated torque, with 140 Nm instantaneous maximum torque for short-duration load demands. Rated speed is 80 RPM and maximum speed is 130 RPM. The combination of integrated gearing, network communication, protected housing, and compact mechanical dimensions makes it suitable for connected motion systems that require both torque capacity and a short installation length. Unit weight is 1200 g.
- Integrated planetary joint module for compact robotic and motion-control axes
- 44 Nm rated torque with 140 Nm instantaneous maximum torque
- CAN / EtherCAT communication for networked motion assemblies
- 24-48 VDC input with IP54 protection
- 61.2 ±0.5 mm length with 7.5 mm through hole for compact mechanical integration
Typical use includes articulated motion systems, compact robotic axes, and networked motion-control assemblies where a compact integrated joint with planetary reduction, communication capability, and defined mechanical integration dimensions is required.