



Motor Characteristics
| Parameter | Unit | 57ZWS50X-1 | 57ZWS63X-1 | 57ZWS75X-1 |
|---|---|---|---|---|
| Motor Length | mm | 50 | 63 | 75 |
| Feedback Method | Hall Sensors | Hall Sensors | Hall Sensors | |
| Commutation Angle | 120° | 120° | 120° | |
| Insulation Strength (Withstand Voltage) | 500VAC/1KHz/1mA/1s | 500VAC/1KHz/1mA/1s | 500VAC/1KHz/1mA/1s | |
| Insulation Resistance | 100 MΩ/500VDC | 100 MΩ/500VDC | 100 MΩ/500VDC | |
| Weight | kg | 0.42 | 0.65 | 0.87 |
| Rated Voltage | V | 24 | 24 | 24 |
| Rated Power | W | 37.4 | 69.1 | 103.7 |
| Rated Torque | Nm | 0.119 | 0.22 | 0.33 |
| Rated Speed | RPM | 3000 | 3000 | 3000 |
| Rated Current | A | 2.2 | 4.1 | 6 |
| Mounting Hole | mm | 47.14(±0.2) | 47.14(±0.2) | 47.14(±0.2) |
| No Load Speed | RPM | 4000 | 4000 | 4000 |
| No Load Current | A | 0.25 | 0.5 | 0.75 |
| Motor Efficiency | % | 75 | 75 | 75 |
| Noise (Ambient noise 20db, test distance 1M) | dB | <50 | <50 | <50 |
| Enclosure – Ambient Thermal Resistance | K/W | 0.53 | 0.27 | 0.18 |
| Motor Thermal Time Constant | min | 4.6 | 5 | 5.7 |
| Ambient Temperature | °C | 29 | 29 | 29 |
| Maximum Winding Temperature | °C | 77.4 | 77.4 | 77.4 |
| Torque Constant | mN·m/A | 0.054 | 0.054 | 0.055 |
| Back-EMF Constant /Effective Value | V/Krpm | 5.66 | 5.66 | 5.66 |
| Shaft Length | mm | 25(±0.5) | 25(±0.5) | 25(±0.5) |
| Peak Torque | Nm | 0.357 | 0.66 | 0.99 |
| Peak Current | A | 6.6 | 12.3 | 18 |
| Inertia Moment | kg·cm² | 0.19 | 0.38 | 0.56 |
| End Cover | Aluminium Die Casting | Aluminium Die Casting | Aluminium Die Casting | |
| Bearing | Deep Groove Ball Bearing | Deep Groove Ball Bearing | Deep Groove Ball Bearing | |
| Magnet | Sinter NdFedB | Sinter NdFedB | Sinter NdFedB | |
| Shaft | Carbon Steel | Carbon Steel | Carbon Steel | |
| Pole Pairs | 5 | 5 | 5 | |
| Phase Resistance | Ω | 0.958 | 0.473 | 0.301 |
| Phase Inductance | mH | 0.742 | 0.357 | 0.205 |
| Winding Connection | Star | Star | Star | |
| Insulation Class | B | B | B | |
| Duty Type | S1 | S1 | S1 |
Technical specifications are for guidance only, as the individual drives and motors are configured for specific applications. Subject to technical and visual changes.
BLDC – Size 57mm
PDF Downloads
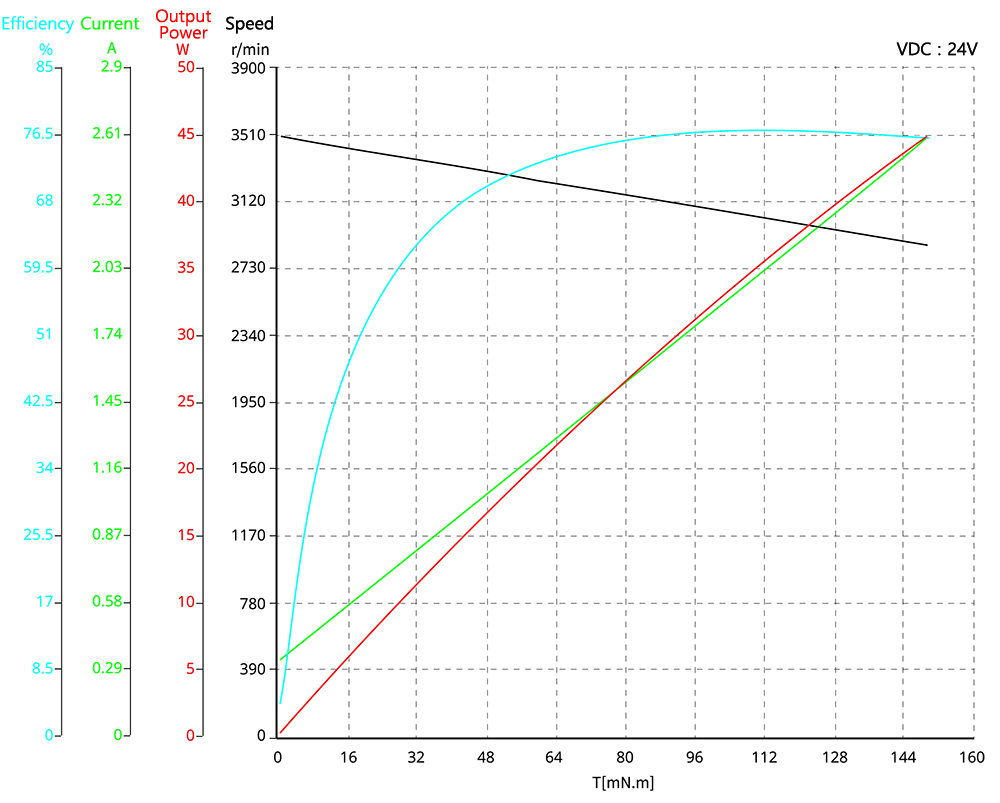
| Parameter | Unit | 57ZWS50X-1 |
|---|---|---|
| Motor Length | mm | 50 |
| Feedback Method | Hall Sensors | |
| Commutation Angle | 120° | |
| Insulation Strength (Withstand Voltage) | 500VAC/1KHz/1mA/1s | |
| Insulation Resistance | 100 MΩ/500VDC | |
| Weight | kg | 0.42 |
| Rated Voltage | V | 24 |
| Rated Power | W | 37.4 |
| Rated Torque | Nm | 0.119 |
| Rated Speed | RPM | 3000 |
| Rated Current | A | 2.2 |
| Mounting Hole | mm | 47.14(±0.2) |
| No Load Speed | RPM | 4000 |
| No Load Current | A | 0.25 |
| Motor Efficiency | % | 75 |
| Noise (Ambient noise 20db, test distance 1M) | dB | <50 |
| Enclosure – Ambient Thermal Resistance | K/W | 0.53 |
| Motor Thermal Time Constant | min | 4.6 |
| Ambient Temperature | °C | 29 |
| Maximum Winding Temperature | °C | 77.4 |
| Torque Constant | mN·m/A | 0.054 |
| Back-EMF Constant /Effective Value | V/Krpm | 5.66 |
| Shaft Length | mm | 25(±0.5) |
| Peak Torque | Nm | 0.357 |
| Peak Current | A | 6.6 |
| Inertia Moment | kg·cm² | 0.19 |
| End Cover | Aluminium Die Casting | |
| Bearing | Deep Groove Ball Bearing | |
| Magnet | Sinter NdFedB | |
| Shaft | Carbon Steel | |
| Pole Pairs | 5 | |
| Phase Resistance | Ω | 0.958 |
| Phase Inductance | mH | 0.742 |
| Winding Connection | Star | |
| Insulation Class | B | |
| Duty Type | S1 |
Technical specifications are for guidance only, as the individual drives and motors are configured for specific applications. Subject to technical and visual changes.
PDF Downloads
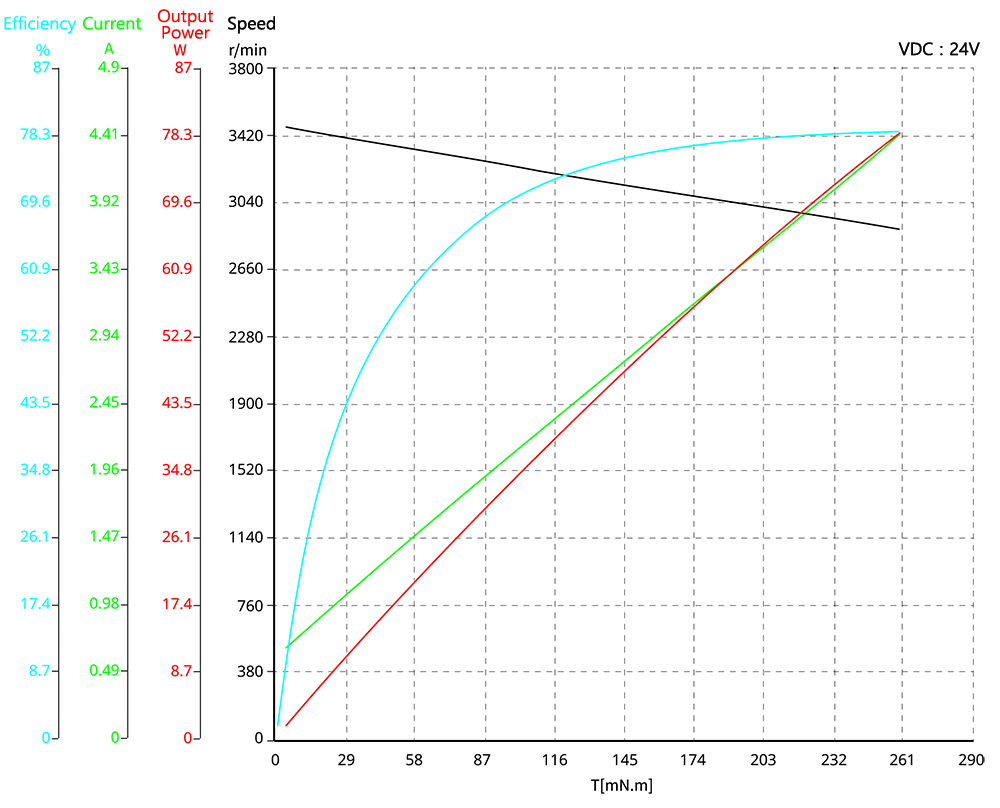
| Parameter | Unit | 57ZWS63X-1 |
|---|---|---|
| Motor Length | mm | 63 |
| Feedback Method | Hall Sensors | |
| Commutation Angle | 120° | |
| Insulation Strength (Withstand Voltage) | 500VAC/1KHz/1mA/1s | |
| Insulation Resistance | 100 MΩ/500VDC | |
| Weight | kg | 0.65 |
| Rated Voltage | V | 24 |
| Rated Power | W | 69.1 |
| Rated Torque | Nm | 0.22 |
| Rated Speed | RPM | 3000 |
| Rated Current | A | 4.1 |
| Mounting Hole | mm | 47.14(±0.2) |
| No Load Speed | RPM | 4000 |
| No Load Current | A | 0.5 |
| Motor Efficiency | % | 75 |
| Noise (Ambient noise 20db, test distance 1M) | dB | <50 |
| Enclosure – Ambient Thermal Resistance | K/W | 0.27 |
| Motor Thermal Time Constant | min | 5 |
| Ambient Temperature | °C | 29 |
| Maximum Winding Temperature | °C | 77.4 |
| Torque Constant | mN·m/A | 0.054 |
| Back-EMF Constant /Effective Value | V/Krpm | 5.66 |
| Shaft Length | mm | 25(±0.5) |
| Peak Torque | Nm | 0.66 |
| Peak Current | A | 12.3 |
| Inertia Moment | kg·cm² | 0.38 |
| End Cover | Aluminium Die Casting | |
| Bearing | Deep Groove Ball Bearing | |
| Magnet | Sinter NdFedB | |
| Shaft | Carbon Steel | |
| Pole Pairs | 5 | |
| Phase Resistance | Ω | 0.473 |
| Phase Inductance | mH | 0.357 |
| Winding Connection | Star | |
| Insulation Class | B | |
| Duty Type | S1 |
Technical specifications are for guidance only, as the individual drives and motors are configured for specific applications. Subject to technical and visual changes.
BLDC – Size 57mm
PDF Downloads
| Parameter | Unit | 57ZWS75X-1 |
|---|---|---|
| Motor Length | mm | 75 |
| Feedback Method | Hall Sensors | |
| Commutation Angle | 120° | |
| Insulation Strength (Withstand Voltage) | 500VAC/1KHz/1mA/1s | |
| Insulation Resistance | 100 MΩ/500VDC | |
| Weight | kg | 0.87 |
| Rated Voltage | V | 24 |
| Rated Power | W | 103.7 |
| Rated Torque | Nm | 0.33 |
| Rated Speed | RPM | 3000 |
| Rated Current | A | 6 |
| Mounting Hole | mm | 47.14(±0.2) |
| No Load Speed | RPM | 4000 |
| No Load Current | A | 0.75 |
| Motor Efficiency | % | 75 |
| Noise (Ambient noise 20db, test distance 1M) | dB | <50 |
| Enclosure – Ambient Thermal Resistance | K/W | 0.18 |
| Motor Thermal Time Constant | min | 5.7 |
| Ambient Temperature | °C | 29 |
| Maximum Winding Temperature | °C | 77.4 |
| Torque Constant | mN·m/A | 0.055 |
| Back-EMF Constant /Effective Value | V/Krpm | 5.66 |
| Shaft Length | mm | 25(±0.5) |
| Peak Torque | Nm | 0.99 |
| Peak Current | A | 18 |
| Inertia Moment | kg·cm² | 0.56 |
| End Cover | Aluminium Die Casting | |
| Bearing | Deep Groove Ball Bearing | |
| Magnet | Sinter NdFedB | |
| Shaft | Carbon Steel | |
| Pole Pairs | 5 | |
| Phase Resistance | Ω | 0.301 |
| Phase Inductance | mH | 0.205 |
| Winding Connection | Star | |
| Insulation Class | B | |
| Duty Type | S1 |
Technical specifications are for guidance only, as the individual drives and motors are configured for specific applications. Subject to technical and visual changes.