Beschreibung
Features
1. Input power : DC 24V – 48V
2. Output rated current : 0 – 4.5A (max)
3. Pulse / Direction, RS-485 communication selection support MODBUS-RTU protocol
4. Torque control mode
5. Encoder signal output

Features
1. Input power : DC 24V – 48V
2. Output rated current : 0 – 4.5A (max)
3. Pulse / Direction, RS-485 communication selection support MODBUS-RTU protocol
4. Torque control mode
5. Encoder signal output



| Parameter | Unit | DS-CLS9-FRS4-01 |
|---|---|---|
| Power supply | V | DC 24-48 |
| Communication I/F | RS485, up to 32 nodes | |
| Communication I/F Remarks | MODBUS RTU protocol | |
| Control Method | Position control mode, Torque control mode | |
| Control Method Remarks | Pulse / RS485 | |
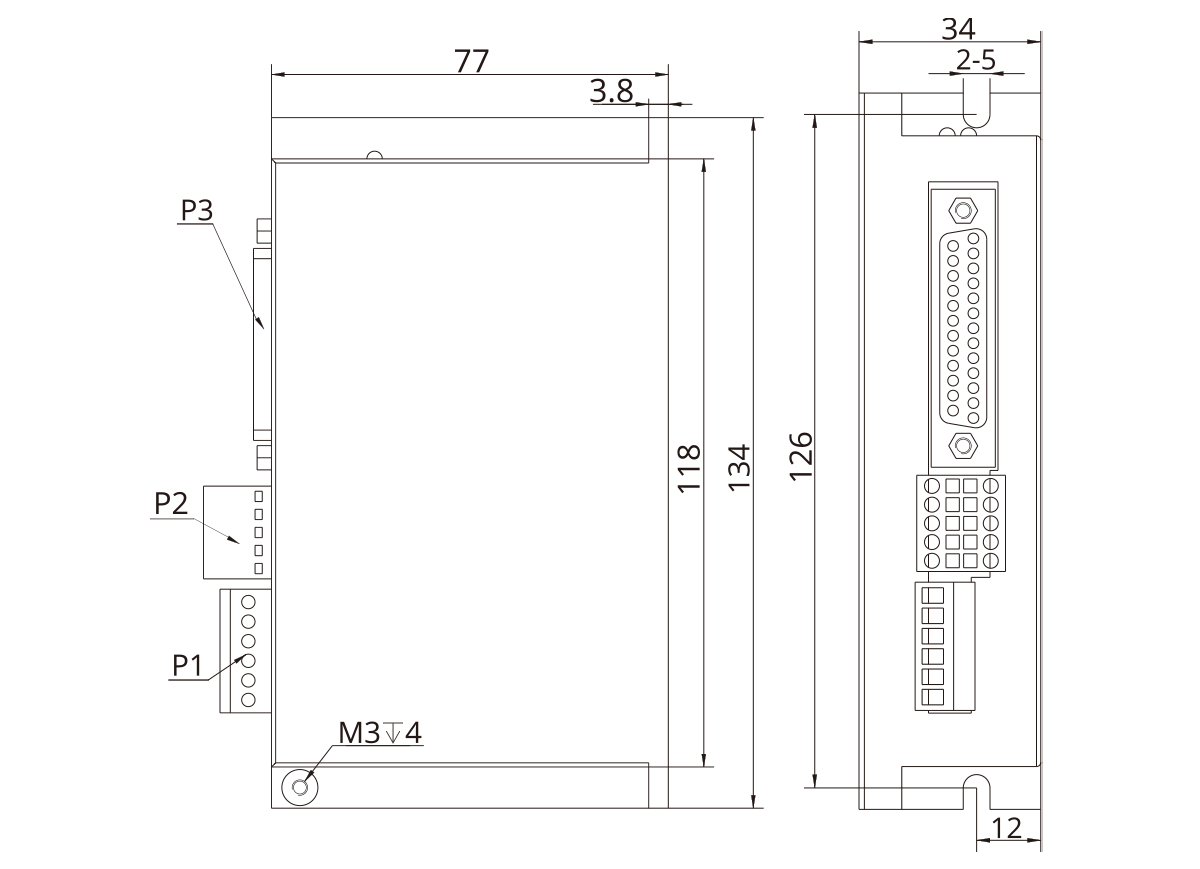
| Dimensions | 77 x 134 x 34mm, without terminal block | |
| Weight | About 350g, without terminal block | |
| Operating temperature/humidity | 0~45°C, 85%RH or less, prevent condensation | |
| Storage temperature | 0~85°C, 85% or less, prevent condensation | |
| Ambient gas | Prevent corrosive gases | |
| Output current | max | 4.5 A |
| Brake | – | |
| Adapted Motor | 2-phase hybrid stepper motor with encoder | |
| Drive Mode | PWM constant current drive | |
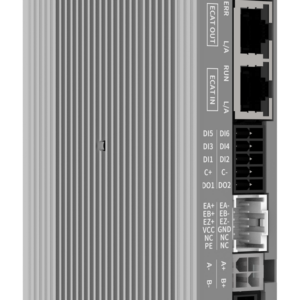
| I/O Signals | [Input] – Pulse, direction input (configurable as digital input) – 5 Digital input – Encoder input (A, B, Z) [Output] – 4 digital outputs – Encoder signal output (differential A, B, Z) | |
| I/O Signals Remarks | The rest of input/output can be freely configured via communication, except that the encoder output is fixed. | |
| Digital input details | /SV ON (Servo On) /RESET (Alarm reset) /START (Motor start/stop) /JOG (Motor jog) /HOME (Zero point) | |
| Digital output details | /IN POSITION /ALARM | |
| LED indication | Status, fault, 2 indicators |
Technische Angaben dienen als Orientierungswerte, da die einzelnen Antriebe und Motoren anwendungsbezogen konfiguriert werden. Technische und optische Änderungen vorbehalten.
 1. When designs installation, please consider the size of terminals and pace required for heat dissipation.
2. The reliable working temperature of the driver is usually within 60℃ and motor is within 80℃.
3. When install driver, please install it vertically and laterally to make the radiator from strong air convection, when necessary, install a fan near the driver to force heat dissipation to ensure that the driver works within reliable working temperature range.
1. When designs installation, please consider the size of terminals and pace required for heat dissipation.
2. The reliable working temperature of the driver is usually within 60℃ and motor is within 80℃.
3. When install driver, please install it vertically and laterally to make the radiator from strong air convection, when necessary, install a fan near the driver to force heat dissipation to ensure that the driver works within reliable working temperature range.