Beschreibung
43mm BLDC outer rotor, sensorless

Loggen Sie sich ein, um Preise für dieses Produkt zu sehen
43mm BLDC outer rotor, sensorless
43mm BLDC outer rotor, sensorless



| Parameter | Unit | BO4316NB2B05-38-24.0 | BO4316NB2B10-36-12.0 |
|---|---|---|---|
| Voltage | V | 24.0 | 12.0 |
| Terminal resistance | Ohm | 3.8 | 1.4 |
| Terminal inductance | mH | 2.8 | 0.74 |
| No-load speed | rpm | 3800 | 3600 |
| No-load current | mA | 0.08 | 0.14 |
| Stall torque | mNm | 371 | 264 |
| Stall current | mA | 6.3 | 8.6 |
| Nominal torque | mNm | 79.7 | 69.5 |
| Nominal speed | rpm | 2640 | 2250 |
| Nominal current | mA | 1.43 | 2.37 |
| Max. output power | W | 37 | 25 |
| Max. efficiency | % | 78.7 | 76.0 |
| Back-EMF constant | mV/rpm | 6.24 | 3.28 |
| Torque constant | mNm/A | 59.5 | 31.3 |
| Speed/torque gradient | rpm/mNm | 10.2 | 13.6 |
| Rotor inertia | g·cm² | 97 | 97 |
| Weight | g | 71.5 | 71.5 |
| Thermal resistance housing-ambient | K/W | 5.8 | 5.8 |
| Thermal resistance winding-housing | K/W | 2.8 | 2.8 |
| Thermal time constant motor | s | 400 | 400 |
| Thermal time constant winding | s | 13 | 13 |
| Operating temperature range | °C | -40~+120 | -40~+120 |
| Thermal class of winding | °C | 155 | 155 |
| Axial play | mm | 0.012 | 0.012 |
| Radial play | mm | 0.008 | 0.008 |
| Axial load dynamic | N | 8 | 8 |
| Axial load static | N | 85 | 85 |
| Radial load at 3 mm from mounting face | N | 26 | 26 |
| No. of pole pairs | 8 | 8 | |
| Bearings | 2 ball bearings | 2 ball bearings | |
| Protection class | IP | 30 | 30 |
| Commutation | Hall Sensor | Hall Sensor |
Technische Angaben dienen als Orientierungswerte, da die einzelnen Antriebe und Motoren anwendungsbezogen konfiguriert werden. Technische und optische Änderungen vorbehalten.
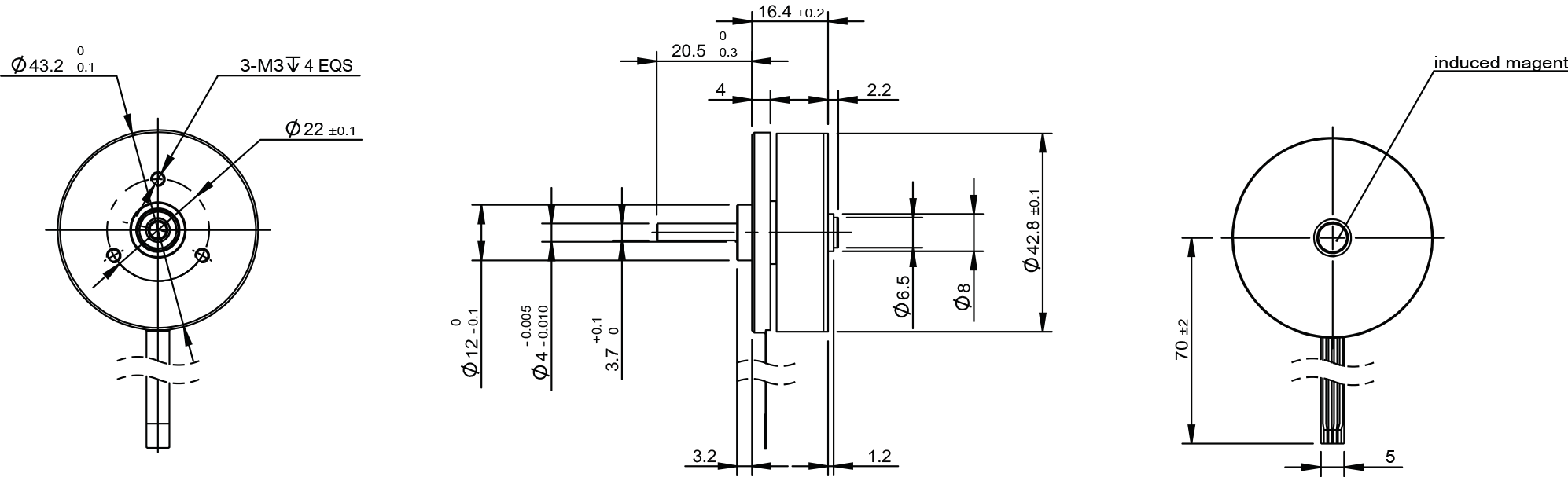 2D drawing BO4316NB2B
2D drawing BO4316NB2B
| Parameter | Unit | BO4316NB2B05-38-24.0 |
|---|---|---|
| Voltage | V | 24.0 |
| Terminal resistance | Ohm | 3.8 |
| Terminal inductance | mH | 2.8 |
| No-load speed | rpm | 3800 |
| No-load current | mA | 0.08 |
| Stall torque | mNm | 371 |
| Stall current | mA | 6.3 |
| Nominal torque | mNm | 79.7 |
| Nominal speed | rpm | 2640 |
| Nominal current | mA | 1.43 |
| Max. output power | W | 37 |
| Max. efficiency | % | 78.7 |
| Back-EMF constant | mV/rpm | 6.24 |
| Torque constant | mNm/A | 59.5 |
| Speed/torque gradient | rpm/mNm | 10.2 |
| Rotor inertia | g·cm² | 97 |
| Weight | g | 71.5 |
| Thermal resistance housing-ambient | K/W | 5.8 |
| Thermal resistance winding-housing | K/W | 2.8 |
| Thermal time constant motor | s | 400 |
| Thermal time constant winding | s | 13 |
| Operating temperature range | °C | -40~+120 |
| Thermal class of winding | °C | 155 |
| Axial play | mm | 0.012 |
| Radial play | mm | 0.008 |
| Axial load dynamic | N | 8 |
| Axial load static | N | 85 |
| Radial load at 3 mm from mounting face | N | 26 |
| No. of pole pairs | 8 | |
| Bearings | 2 ball bearings | |
| Protection class | IP | 30 |
| Commutation | Hall Sensor |
Technische Angaben dienen als Orientierungswerte, da die einzelnen Antriebe und Motoren anwendungsbezogen konfiguriert werden. Technische und optische Änderungen vorbehalten.
| Parameter | Unit | BO4316NB2B10-36-12.0 |
|---|---|---|
| Voltage | V | 12.0 |
| Terminal resistance | Ohm | 1.4 |
| Terminal inductance | mH | 0.74 |
| No-load speed | rpm | 3600 |
| No-load current | mA | 0.14 |
| Stall torque | mNm | 264 |
| Stall current | mA | 8.6 |
| Nominal torque | mNm | 69.5 |
| Nominal speed | rpm | 2250 |
| Nominal current | mA | 2.37 |
| Max. output power | W | 25 |
| Max. efficiency | % | 76.0 |
| Back-EMF constant | mV/rpm | 3.28 |
| Torque constant | mNm/A | 31.3 |
| Speed/torque gradient | rpm/mNm | 13.6 |
| Rotor inertia | g·cm² | 97 |
| Weight | g | 71.5 |
| Thermal resistance housing-ambient | K/W | 5.8 |
| Thermal resistance winding-housing | K/W | 2.8 |
| Thermal time constant motor | s | 400 |
| Thermal time constant winding | s | 13 |
| Operating temperature range | °C | -40~+120 |
| Thermal class of winding | °C | 155 |
| Axial play | mm | 0.012 |
| Radial play | mm | 0.008 |
| Axial load dynamic | N | 8 |
| Axial load static | N | 85 |
| Radial load at 3 mm from mounting face | N | 26 |
| No. of pole pairs | 8 | |
| Bearings | 2 ball bearings | |
| Protection class | IP | 30 |
| Commutation | Hall Sensor |
Technische Angaben dienen als Orientierungswerte, da die einzelnen Antriebe und Motoren anwendungsbezogen konfiguriert werden. Technische und optische Änderungen vorbehalten.
2D drawing BO4316NB2B