Beschreibung
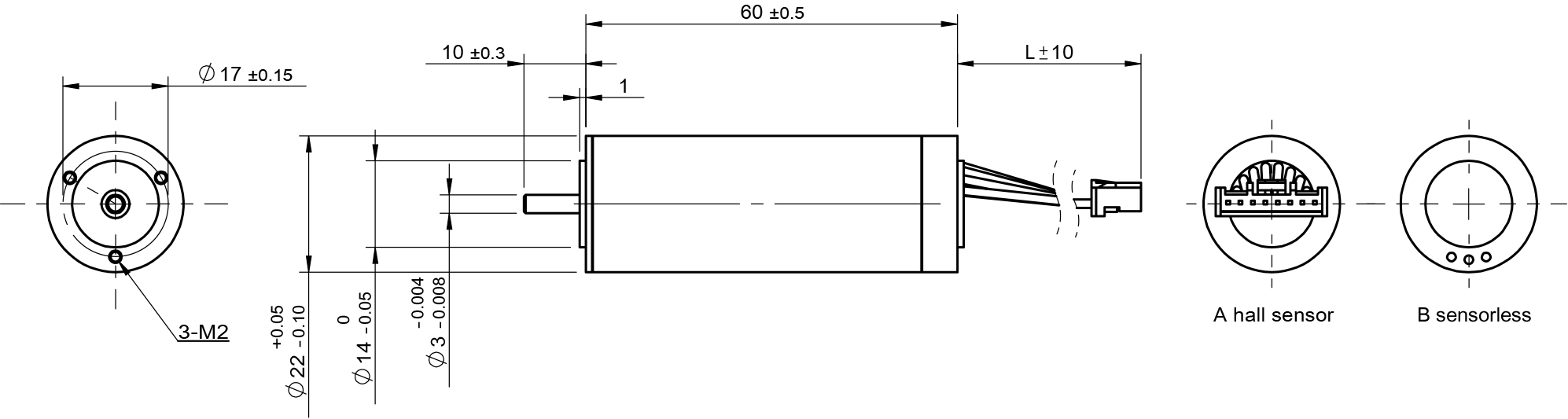
BH2260NH2B is a precision 22mm slotless brushless DC (BLDC) motor series engineered for high efficiency, smooth operation, and accurate feedback. Its inner rotor design and integrated Hall sensors provide precise speed and position control, making it well-suited for high-end industrial tasks.
- Key Features:
- Slotless stator architecture for minimal cogging and exceptional smoothness
- Integrated Hall-effect sensors for reliable commutation and feedback
- High energy efficiency and compact 22mm outer diameter
- Robust design supports demanding industrial environments
- Applications:
- Industrial automation systems requiring responsive motion control
- Medical equipment demanding smooth, vibration-free performance
- Robotics for precise actuation and repeatable movement
- Electric tools needing power-dense, reliable drive solutions
- Customization & Options:
- Available with various shaft lengths, gear heads, and bearing types
- Special coils for application-specific performance
- Optional encoder and integrated Hall-sensor feedback
- Integrated driver options for streamlined system integration
BH2260NH2B motors deliver the blend of compact size, precision, and flexibility industrial engineers require for modern motion control applications.