Beschreibung
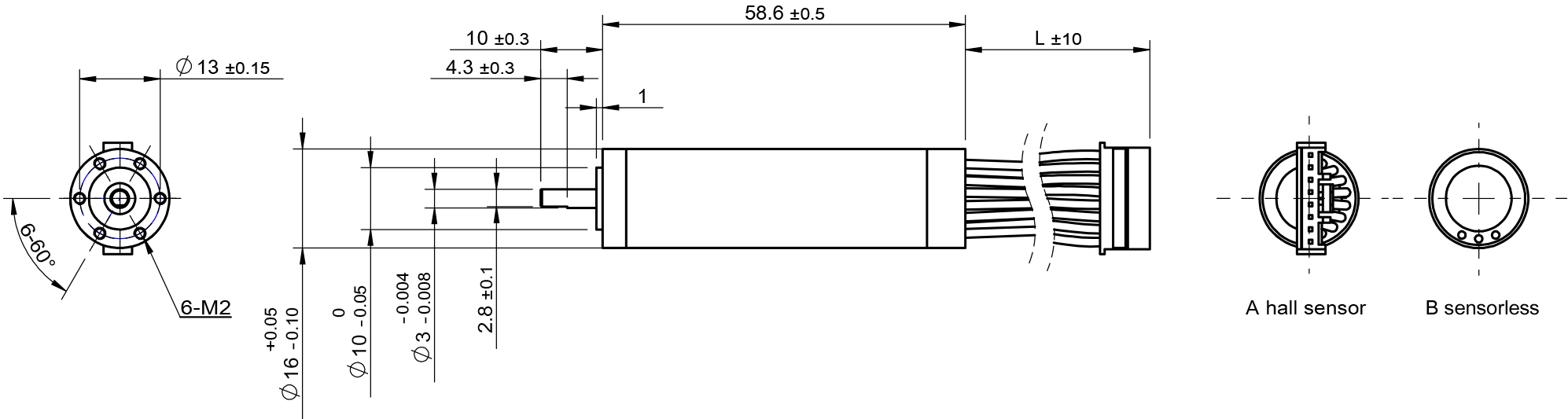
BH1659NH2B 16mm BLDC Motor Family
- Type: 16mm brushless DC (BLDC), inner rotor, slotless design with integrated sensors
- Key Features:
- High efficiency, low cogging design for smooth, quiet operation
- Compact form factor ideal for space-constrained environments
- Sensored feedback for precise speed and position control
- Multiple customizable options: shaft length, special coils, gearheads, bearing type, hall-sensors, encoder, and driver compatibility
- Typical Applications:
- Industrial automation—precision actuation and motion control
- Medical equipment—reliable, low-noise performance for sensitive devices
- Robotics—compact drive for manipulators, grippers, and joints
- Electrical tools—high torque and speed stability in portable instruments
With its slotless, inner rotor architecture, the BH1659NH2B achieves excellent energy efficiency and thermal management, extending operational life even in continuous-duty cycles. Sensor integration ensures accurate, repeatable positioning, making it a preferred choice for automation engineers and system integrators requiring reliable performance in critical motion applications. Comprehensive customization, including advanced feedback and drive solutions, maximizes system flexibility and simplifies integration.