






Motor Characteristics
| Parameter | Unit | DS-CLS9-FRS4 | DS-CLS9-FRS4-01 | DS-CLS9-FETC |
|---|---|---|---|---|
| Power supply | V | DC 24-48 | DC 24-48 | DC 24 – 48 V |
| Communication I/F | RS485, up to 32 nodes | RS485, up to 32 nodes | – | |
| Communication I/F Remarks | MODBUS RTU protocol | MODBUS RTU protocol | MODBUS RTU protocol | |
| Control Method | Position control mode | Position control mode, Torque control mode | PP, PV, Home, CSP | |
| Control Method Remarks | Pulse / RS485 | Pulse / RS485 | – | |
| Dimensions | 77 x 134 x 34mm, without terminal block | 77 x 134 x 34mm, without terminal block | 156 x 97 x 33.5mm, without terminal block | |
| Weight | About 350g, without terminal block | About 350g, without terminal block | About 500g, without terminal block | |
| Operating temperature/humidity | 0~45°C, 85%RH or less, prevent condensation | 0~45°C, 85%RH or less, prevent condensation | 0~45°C, 85% RH or less, prevent condensation | |
| Storage temperature | 0~85°C, 85% or less, prevent condensation | 0~85°C, 85% or less, prevent condensation | 0~85°C, 85% RH or less, prevent condensation | |
| Ambient gas | Prevent corrosive gases | Prevent corrosive gases | Prevent corrosive gases | |
| Output Current | max | 4.5 A | 4.5 A | 6.5 A |
| Brake | – | – | Brake output | |
| Adapted Motor | 2-phase hybrid stepper motor with encoder | 2-phase hybrid stepper motor with encoder | 2-phase hybrid stepper motor with INC encoder | |
| Drive Mode | PWM constant current drive | PWM constant current drive | PWM constant current drive | |
| I/O Signals | [Input] – Pulse, direction input (configurable as digital input) – 5 Digital input – Encoder input (A, B, Z) [Output] – 4 digital outputs – Encoder signal output (differential A, B, Z) | [Input] – Pulse, direction input (configurable as digital input) – 5 Digital input – Encoder input (A, B, Z) [Output] – 4 digital outputs – Encoder signal output (differential A, B, Z) | [Input] – 2 High-speed inputs – 5 Digital inputs – Encoder input (A, B, Z) [Output] – 3 digital outputs – Encoder signal output (differential A, B, Z) | |
| I/O Signals Remarks | The rest of input /output can be freely configured via communication, except that the encoder output is fixed. | The rest of input/output can be freely configured via communication, except that the encoder output is fixed. | The rest of input /output can be freely configured via communication, except that the encoder output is fixed. | |
| Digital input details | /SV ON (Servo On) /RESET (Alarm reset) /START (Motor start / stop) /JOG (Motor jog) /HOME (Zero point) | /SV ON (Servo On) /RESET (Alarm reset) /START (Motor start/stop) /JOG (Motor jog) /HOME (Zero point) | Enable Alarm reset Positive limit Negative limit, Emergency stop Origin, etc | |
| Digital output details | /IN POSITION /ALARM | /IN POSITION /ALARM | /IN-POSITION /ALARM | |
| LED indication | Status, fault, 2 indicators | Status, fault, 2 indicators | Status, fault |
Technical specifications are for guidance only, as the individual drives and motors are configured for specific applications. Subject to technical and visual changes.
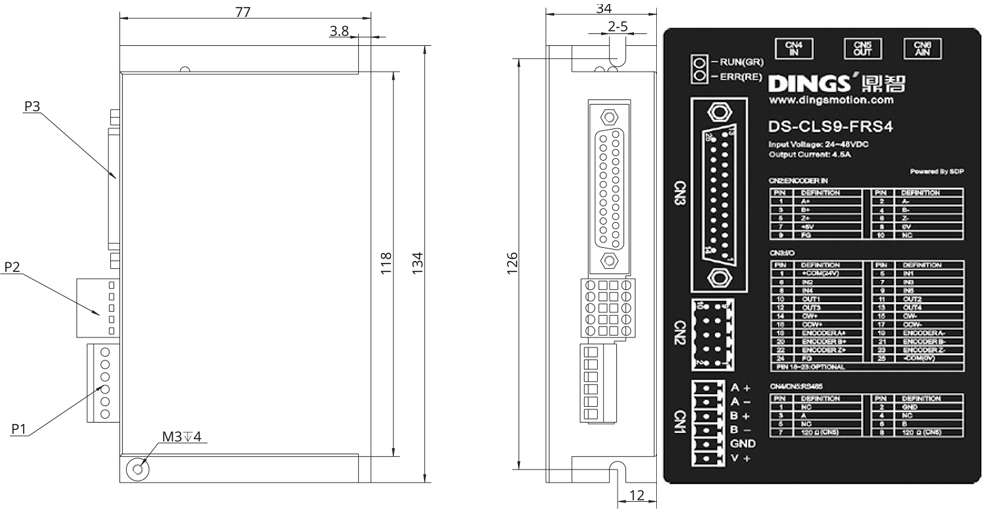
DS-CLS9-FRS4
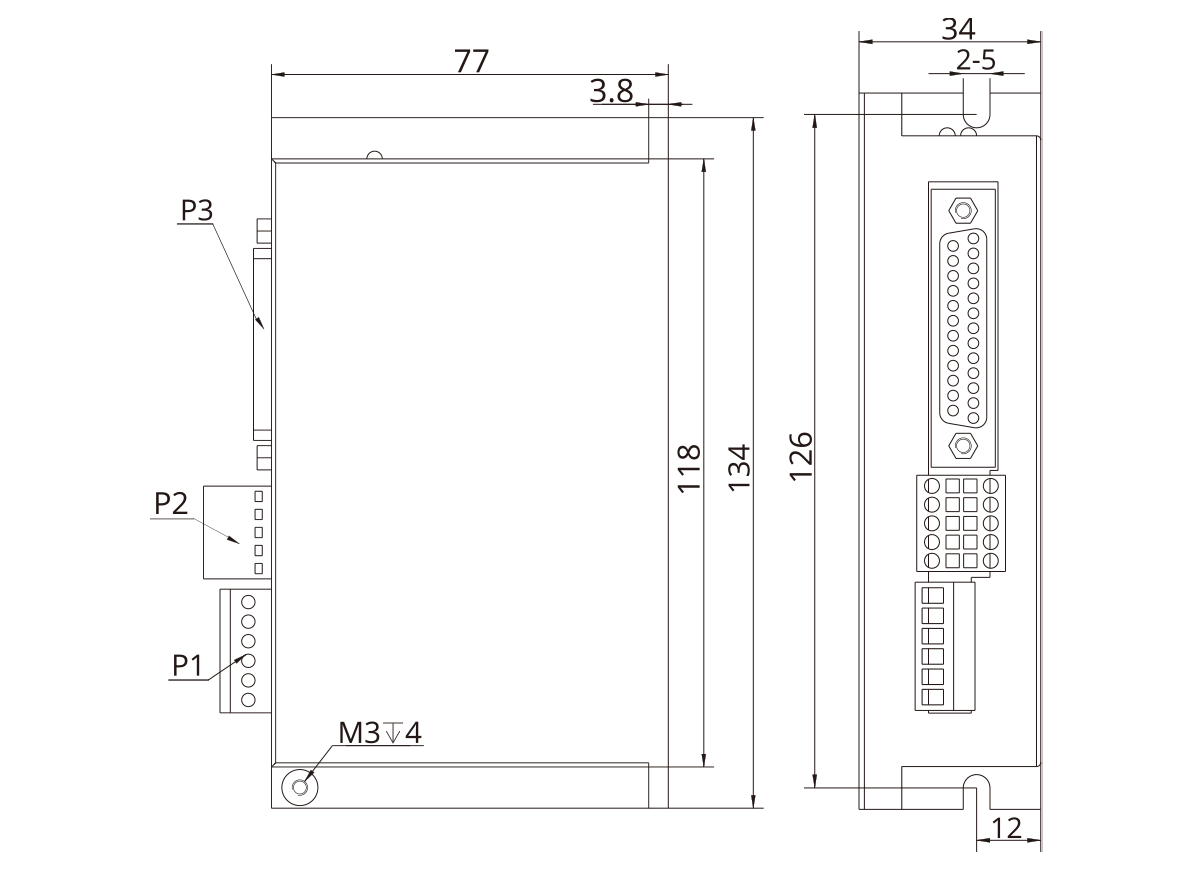
DS-CLS9-FRS4-01
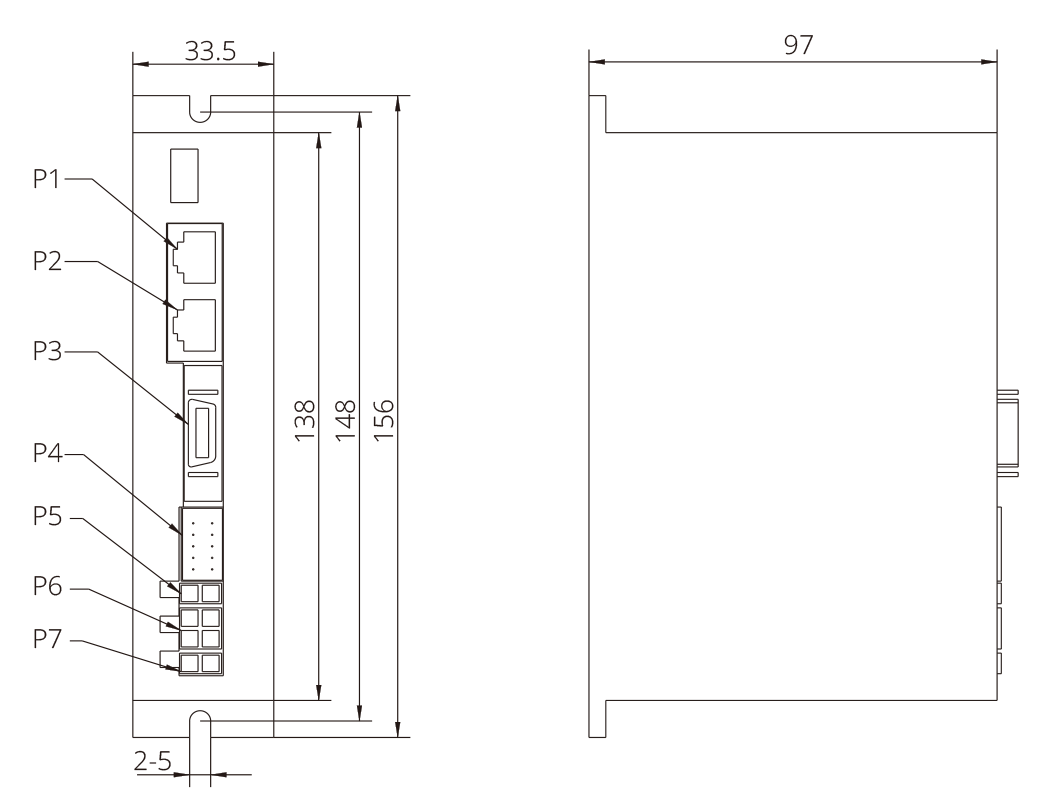
DS-CLS9-FETC
PDF Downloads
Stand Alone Stepper Electronics 4
| Parameter | Unit | DS-CLS9-FRS4 |
|---|---|---|
| Power supply | V | DC 24-48 |
| Communication I/F | RS485, up to 32 nodes | |
| Communication I/F Remarks | MODBUS RTU protocol | |
| Control Method | Position control mode | |
| Control Method Remarks | Pulse / RS485 | |
| Dimensions | 77 x 134 x 34mm, without terminal block | |
| Weight | About 350g, without terminal block | |
| Operating temperature/humidity | 0~45°C, 85%RH or less, prevent condensation | |
| Storage temperature | 0~85°C, 85% or less, prevent condensation | |
| Ambient gas | Prevent corrosive gases | |
| Output Current | max | 4.5 A |
| Brake | – | |
| Adapted Motor | 2-phase hybrid stepper motor with encoder | |
| Drive Mode | PWM constant current drive | |
| I/O Signals | [Input] – Pulse, direction input (configurable as digital input) – 5 Digital input – Encoder input (A, B, Z) [Output] – 4 digital outputs – Encoder signal output (differential A, B, Z) | |
| I/O Signals Remarks | The rest of input /output can be freely configured via communication, except that the encoder output is fixed. | |
| Digital input details | /SV ON (Servo On) /RESET (Alarm reset) /START (Motor start / stop) /JOG (Motor jog) /HOME (Zero point) | |
| Digital output details | /IN POSITION /ALARM | |
| LED indication | Status, fault, 2 indicators |
Technical specifications are for guidance only, as the individual drives and motors are configured for specific applications. Subject to technical and visual changes.
PDF Downloads
Stand Alone Stepper Electronics 4
| Parameter | Unit | DS-CLS9-FRS4-01 |
|---|---|---|
| Power supply | V | DC 24-48 |
| Communication I/F | RS485, up to 32 nodes | |
| Communication I/F Remarks | MODBUS RTU protocol | |
| Control Method | Position control mode, Torque control mode | |
| Control Method Remarks | Pulse / RS485 | |
| Dimensions | 77 x 134 x 34mm, without terminal block | |
| Weight | About 350g, without terminal block | |
| Operating temperature/humidity | 0~45°C, 85%RH or less, prevent condensation | |
| Storage temperature | 0~85°C, 85% or less, prevent condensation | |
| Ambient gas | Prevent corrosive gases | |
| Output Current | max | 4.5 A |
| Brake | – | |
| Adapted Motor | 2-phase hybrid stepper motor with encoder | |
| Drive Mode | PWM constant current drive | |
| I/O Signals | [Input] – Pulse, direction input (configurable as digital input) – 5 Digital input – Encoder input (A, B, Z) [Output] – 4 digital outputs – Encoder signal output (differential A, B, Z) | |
| I/O Signals Remarks | The rest of input/output can be freely configured via communication, except that the encoder output is fixed. | |
| Digital input details | /SV ON (Servo On) /RESET (Alarm reset) /START (Motor start/stop) /JOG (Motor jog) /HOME (Zero point) | |
| Digital output details | /IN POSITION /ALARM | |
| LED indication | Status, fault, 2 indicators |
Technical specifications are for guidance only, as the individual drives and motors are configured for specific applications. Subject to technical and visual changes.
DS-CLS9-FRS4-01
PDF Downloads
Stand Alone Stepper Electronics 4
| Parameter | Unit | DS-CLS9-FETC |
|---|---|---|
| Power supply | DC 24 – 48 V | |
| Digital input details | Enable Alarm reset Positive limit Negative limit, Emergency stop Origin, etc | |
| Digital output details | /IN-POSITION /ALARM | |
| LED indication | Status, fault | |
| Communication I/F | – | |
| Control Method Remarks | – | |
| Control Method | PP, PV, Home, CSP | |
| Control Method Remarks | – | |
| Dimensions | 156 x 97 x 33.5mm, without terminal block | |
| Weight | About 500g, without terminal block | |
| Operating temperature/humidity | 0~45°C, 85% RH or less, prevent condensation | |
| Storage temperature | 0~85°C, 85% RH or less, prevent condensation | |
| Ambient gas | Prevent corrosive gases | |
| EtherCAT Communication Address (nodes) | 1-255 | |
| Output Current | max | 6.5 A |
| Brake | Brake output | |
| Adapted Motor | 2-phase hybrid stepper motor with INC encoder | |
| Drive Mode | PWM constant current drive | |
| I/O Signals | [Input] – 2 High-speed inputs – 5 Digital inputs – Encoder input (A, B, Z) [Output] – 3 digital outputs – Encoder signal output (differential A, B, Z) | |
| I/O Signals Remarks | The rest of input /output can be freely configured via communication, except that the encoder output is fixed. |
Technical specifications are for guidance only, as the individual drives and motors are configured for specific applications. Subject to technical and visual changes.