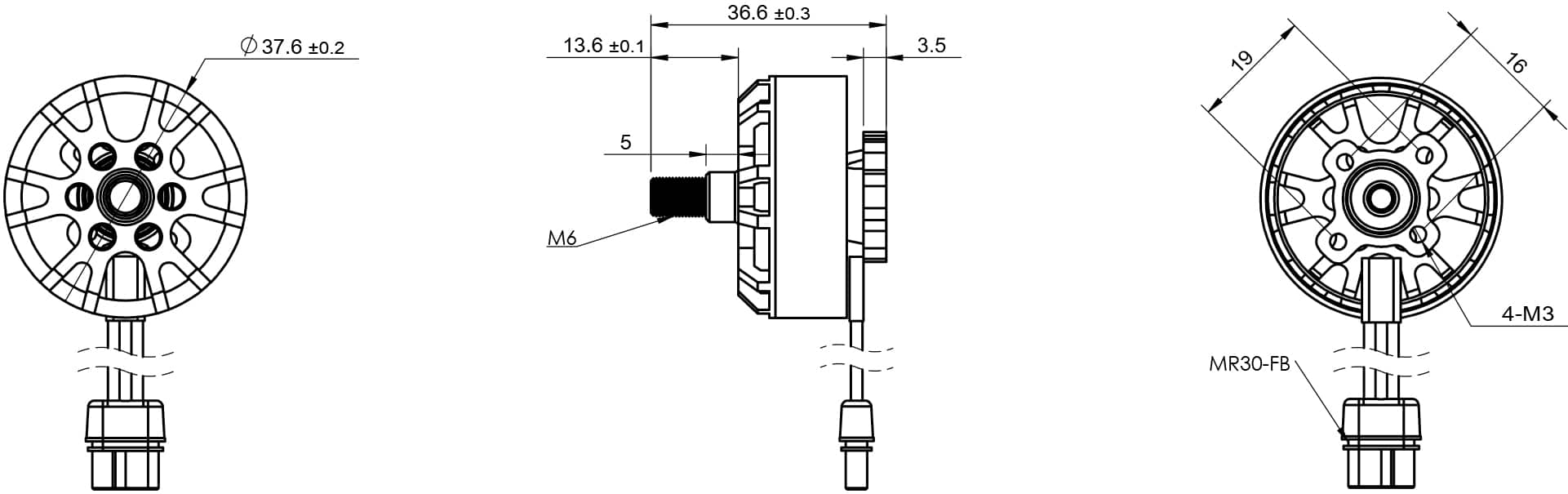
BO3823N2B
The BO3823N2B series features compact 38mm outer rotor BLDC motors with sensorless control, providing high torque and smooth performance. Designed for UAVs, electrical tools, automation equipment, and smart home devices, this family offers flexible configuration options including customizable shaft length, special coils, gear heads, and feedback solutions like encoders or hall sensors.