Description
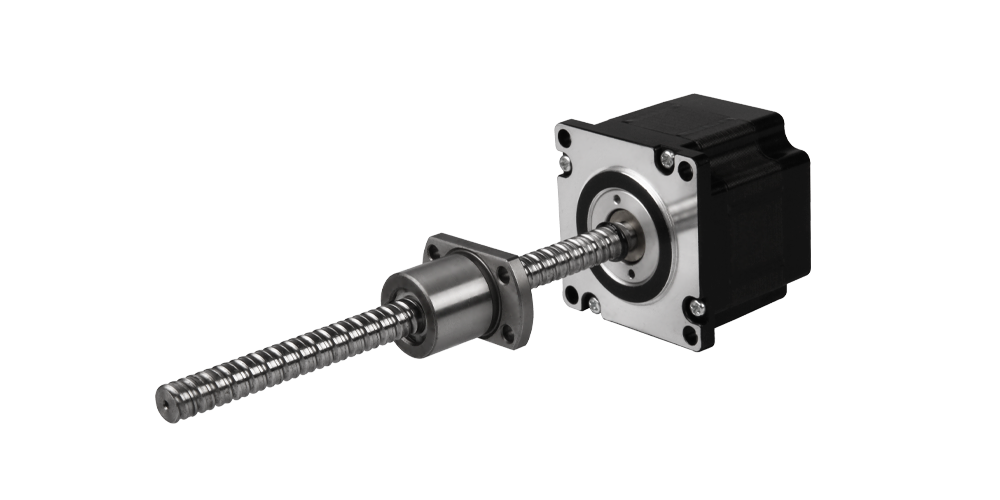
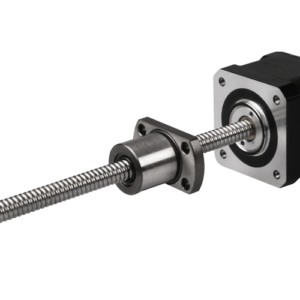
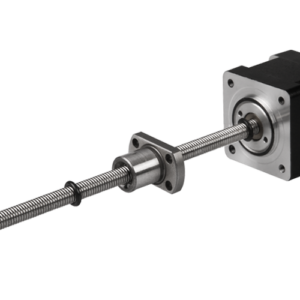
The SBSLA Size 23 [57mm] External Stepper Ball Screw Linear Actuator is engineered for demanding linear motion applications that require precise control and compact integration. This actuator family combines a robust stepper motor with high-precision ball screws (multiple types including 1002, 1004, 1005, 1010, 1015, 1020, 1202, 1210), offering C7 accuracy and ball sizes from Ø1.5875 to Ø2.381 mm to suit a wide range of load and speed requirements.
- Key Features:
- Compact NEMA 23 (57mm) size for easy system integration
- High-performance ball screws with surface hardness HRC58~62 and SCM415H nut material for longevity
- Anti-rust oil treatment for enhanced durability
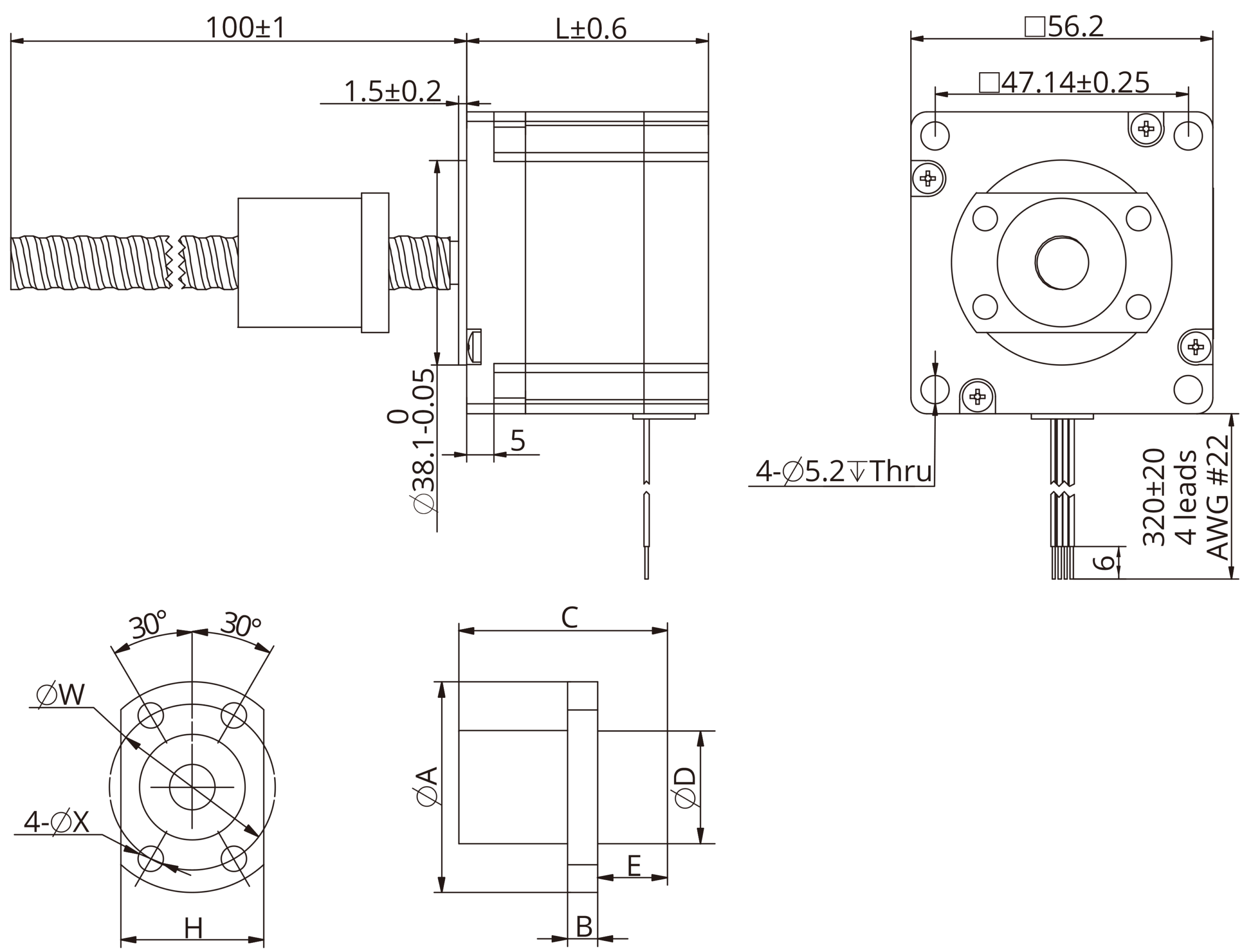
- Multiple nut sizes (A, B, C, D, H, W, X, E) and end machining options (threaded, smooth, custom)
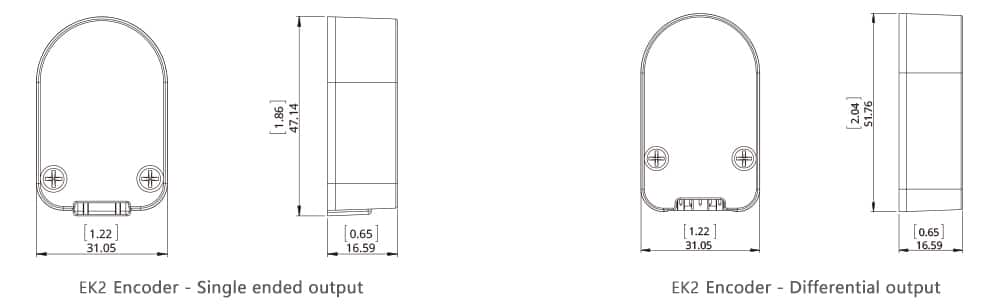
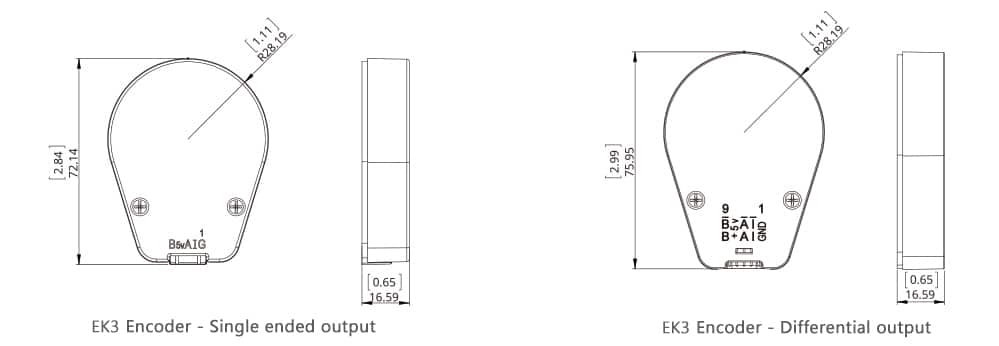
- Configurable with incremental encoders (EK2, EK3) and optional power-off brake
- Technical Specifications:
- Thread direction: Right-hand
- Number of threads: 1 to 4, supporting various application speeds and thrusts
- Dynamic load up to 5100 N, static load up to 9800 N (application/model dependent)
- Positioning accuracy: ±0.05 mm, total runout: 0.12 mm, axial play ≤0.03 mm
- Typical Applications:
- Precision pick-and-place machines
- Automated inspection systems
- Medical and laboratory automation
- Semiconductor, packaging, and small-parts assembly
With modular configuration, high reliability, and excellent repeatability, the SBSLA Size 23 actuator delivers a versatile solution for motion control engineers seeking advanced linear motion in compact footprints.
![SBSLA - Size 11 [28mm]](https://www.kocomotion.de/wp-content/uploads/2025/02/Ball_size1128mm-300x300.png)